# Linux多线程
使用多线程的目的,是合理的利用资源,提高CPU的效率。
# 什么是线程?
# 关于进程
一个正在执行的程序,它是资源分配的最小单位,进程中的事情都需要按一定的时间顺序进行执行。
# 关于线程
进程只能按顺序执行,有很多问题
- 进程是资源拥有者,创建、销毁与切换存在较大的时空开销
- 由于对称处理机(SMP)出现,可以满足多个运行单位,而多个进程并行开销过大
因此引入线程进行资源管理。
线程有时被称为轻量级进程,程序执行的最小单位,系统独立调度和分配CPU的基本单位,它是进程中的一个实体,一个进程中可以有多个线程,这些线程共享进程的所有资源,线程本身只包含一点必备的资源。
# 线程和进程的关系
- 以进程为主的编码方式被称为单线程的编码方式
- 进程是线程的映射,线程是资源的消耗者,线程和进程是多对一的关系
- 线程是进程的基本单位
- 进程可以有多个线程,这些线程共享进程的所有资源
- 子进程创建时会拷贝父进程所有的资源
# 线程基本场景
# 并发
在同一个时刻,只能有一条指令执行,但多进程模式下,指令能够快速轮换执行,使得在宏观上具有多个进程同时执行的效果。
- 看起来是同时发生
- 单核处理
# 并行
在同一时刻,有多条指令在多个处理器上同时执行。
- 真正的同时发生
- 多核处理
# 同步
彼此有依赖的调用不应该同时发生,而同步就是阻止那些”同时发生“的事。因此同步需要确定一些机制,来实现这个目的。
# 异步
异步和同步是相对的,表示任何两个彼此独立的操作是独立的,表明事情的发生独立性。
# 多线程的优势
- 在多处理器中开发程序的并行性
- 在等待慢速IO操作时,程序可以执行其它操作,提高并发性
- 模块化的编程,能更清楚的表单程序独立事件的关系,结构清晰
- 占用较少的系统资源(相对于多进程而言)
- 多线程不一定需要多处理器
# 线程的周期
# 查看线程ID
多线程头文件存在于以下目录
/usr/include/bits/pthreadtypes.h
线程ID : 无符号整数
typedef unsigned long int pthread_t;获取线程ID和进程ID的区别
| 线程 | 进程 | |
|---|---|---|
| 标识符类型 | pthread_t 无符号长整型 | pid_t |
| 获取ID | pthread_self(); | getpid(); |
| 创建 | pthread_create(); | fork( void); |
查看进程、线程ID实例
#include "stdio.h"
#include "pthread.h"
#include "string.h"
#include "stdlib.h"
#include "unistd.h"
#include "sys/types.h"
int main()
{
pthread_t self;
pid_t pid;
pid = getpid();
self = pthread_self();
printf("pid is %u,self is %u",pid,self);
return 0;
}
# 创建一个线程
创建线程的方法
#include<phread.h> int pthread_create(pthread_t *id , pthread_attr_t *attr, void(*fun)(void*), void *arg);id :传递一个pthread_t类型的变量的地址,创建成功后,用来获取新创建的线程的TID
attr:指定线程的属性 默认使用NULL 表示线程的调度策略、继承性、分离性
fun:线程函数的地址,回调函数(新线程要执行的函数)
arg:传递给线程函数的参数(回调函数的参数,多参数使用结构体传递)
返回值,成功返回0,失败返回错误码
usr/include/asm-generic/errno.h 包含了所有的错误码
#define EDEADLK 35 /* Resource deadlock would occur */ #define ENAMETOOLONG 36 /* File name too long */ #define ENOLCK 37 /* No record locks available */ #define ENOSYS 38 /* Function not implemented */ #define ENOTEMPTY 39 /* Directory not empty */ #define ELOOP 40 /* Too many symbolic links encountered */ #define EWOULDBLOCK EAGAIN /* Operation would block */ #define ENOMSG 42 /* No message of desired type */ #define EIDRM 43 /* Identifier removed */ #define ECHRNG 44 /* Channel number out of range */ #define EL2NSYNC 45 /* Level 2 not synchronized */ #define EL3HLT 46 /* Level 3 halted */ #define EL3RST 47 /* Level 3 reset */ #define ELNRNG 48 /* Link number out of range */ #define EUNATCH 49 /* Protocol driver not attached */ #define ENOCSI 50 /* No CSI structure available */ #define EL2HLT 51 /* Level 2 halted */ #define EBADE 52 /* Invalid exchange */ #define EBADR 53 /* Invalid request descriptor */ #define EXFULL 54 /* Exchange full */ #define ENOANO 55 /* No anode */ #define EBADRQC 56 /* Invalid request code */ #define EBADSLT 57 /* Invalid slot */ #define EDEADLOCK EDEADLK #define EBFONT 59 /* Bad font file format */ #define ENOSTR 60 /* Device not a stream */ #define ENODATA 61 /* No data available */ #define ETIME 62 /* Timer expired */ #define ENOSR 63 /* Out of streams resources */ #define ENONET 64 /* Machine is not on the network */ #define ENOPKG 65 /* Package not installed */ #define EREMOTE 66 /* Object is remote */ #define ENOLINK 67 /* Link has been severed */ #define EADV 68 /* Advertise error */ #define ESRMNT 69 /* Srmount error */ #define ECOMM 70 /* Communication error on send */ #define EPROTO 71 /* Protocol error */ #define EMULTIHOP 72 /* Multihop attempted */ #define EDOTDOT 73 /* RFS specific error */ #define EBADMSG 74 /* Not a data message */ #define EOVERFLOW 75 /* Value too large for defined data type */ #define ENOTUNIQ 76 /* Name not unique on network */ #define EBADFD 77 /* File descriptor in bad state */ #define EREMCHG 78 /* Remote address changed */ #define ELIBACC 79 /* Can not access a needed shared library */ #define ELIBBAD 80 /* Accessing a corrupted shared library */ #define ELIBSCN 81 /* .lib section in a.out corrupted */ #define ELIBMAX 82 /* Attempting to link in too many shared libraries */ #define ELIBEXEC 83 /* Cannot exec a shared library directly */ #define EILSEQ 84 /* Illegal byte sequence */ #define ERESTART 85 /* Interrupted system call should be restarted */ #define ESTRPIPE 86 /* Streams pipe error */ #define EUSERS 87 /* Too many users */ #define ENOTSOCK 88 /* Socket operation on non-socket */ #define EDESTADDRREQ 89 /* Destination address required */ #define EMSGSIZE 90 /* Message too long */ #define EPROTOTYPE 91 /* Protocol wrong type for socket */ #define ENOPROTOOPT 92 /* Protocol not available */ #define EPROTONOSUPPORT 93 /* Protocol not supported */ #define ESOCKTNOSUPPORT 94 /* Socket type not supported */ #define EOPNOTSUPP 95 /* Operation not supported on transport endpoint */ #define EPFNOSUPPORT 96 /* Protocol family not supported */ #define EAFNOSUPPORT 97 /* Address family not supported by protocol */ #define EADDRINUSE 98 /* Address already in use */ #define EADDRNOTAVAIL 99 /* Cannot assign requested address */ #define ENETDOWN 100 /* Network is down */ #define ENETUNREACH 101 /* Network is unreachable */ #define ENETRESET 102 /* Network dropped connection because of reset */ #define ECONNABORTED 103 /* Software caused connection abort */ #define ECONNRESET 104 /* Connection reset by peer */ #define ENOBUFS 105 /* No buffer space available */ #define EISCONN 106 /* Transport endpoint is already connected */ #define ENOTCONN 107 /* Transport endpoint is not connected */ #define ESHUTDOWN 108 /* Cannot send after transport endpoint shutdown */ #define ETOOMANYREFS 109 /* Too many references: cannot splice */ #define ETIMEDOUT 110 /* Connection timed out */ #define ECONNREFUSED 111 /* Connection refused */ #define EHOSTDOWN 112 /* Host is down */ #define EHOSTUNREACH 113 /* No route to host */ #define EALREADY 114 /* Operation already in progress */ #define EINPROGRESS 115 /* Operation now in progress */ #define ESTALE 116 /* Stale file handle */ #define EUCLEAN 117 /* Structure needs cleaning */ #define ENOTNAM 118 /* Not a XENIX named type file */ #define ENAVAIL 119 /* No XENIX semaphores available */ #define EISNAM 120 /* Is a named type file */ #define EREMOTEIO 121 /* Remote I/O error */ #define EDQUOT 122 /* Quota exceeded */ #define ENOMEDIUM 123 /* No medium found */ #define EMEDIUMTYPE 124 /* Wrong medium type */ #define ECANCELED 125 /* Operation Canceled */ #define ENOKEY 126 /* Required key not available */ #define EKEYEXPIRED 127 /* Key has expired */ #define EKEYREVOKED 128 /* Key has been revoked */ #define EKEYREJECTED 129 /* Key was rejected by service */ /* for robust mutexes */ #define EOWNERDEAD 130 /* Owner died */ #define ENOTRECOVERABLE 131 /* State not recoverable */ #define ERFKILL 132 /* Operation not possible due to RF-kill */ #define EHWPOISON 133 /* Memory page has hardware error */ #endif
创建线程的使用
代码示例
include "stdio.h"
#include "pthread.h"
#include "string.h"
#include "stdlib.h"
#include "unistd.h"
#include "sys/types.h"
void print_id(char *name)
{
pid_t pid;
pthread_t tid;
pid = getpid();
tid = pthread_self();
printf("%s pid is %u , tid is %u\n",name,pid,tid);
}
void *thread_fun(void *arg)
{
print_id(arg);
return (void *)0;
}
int main()
{
pthread_t self;
int err;
err = pthread_create(&self,NULL,thread_fun,"new thread name is sutinghu");
if(err!=0)
{
printf("thread create failure\n");
return -1;
}
print_id("main thread:");
sleep(2);
return 0;
}
结果
[root@localhost test]# ./thread_create
main thread: pid is 14794 , tid is 1560885056
new thread name is sutinghu pid is 14794 , tid is 1552488192
# 线程的生命周期
主函数中的 main 方法也是一个线程,它被称为主线程 。
# 生命周期
- 当
C程序运行时,首先运行main函数,在线程代码中,这个特殊的执行流程被称为 初始线程 或 主线程。 - 主线程的特殊性在于,它在
main函数返回的时候,会导致进程结束,进程内所有的线程都会结束。 - 在主线程中使用
pthread_exit()函数,这样进程会等待所有线程结束时终止 - 主线程接受参数的方式是通过
argc和````argv普通的线程只有一个参数void*``` - 在绝大多数情况下,主线程在默认堆栈上运行,这个堆栈可以增长到足够的长度,而普通的线程的堆栈是受限制的,一旦溢出就会出错。
- 主线程和其他子线程获取在整个CPU时钟周期中获得资源调度的程度是均等的,也就是说所有线程默认状态下是异步独立运行的。
- 主线程是随着进程的创建而创建
- 其它线程可以通过调用函数来创建,主要调用 pthread_create
- 新线程可能在当前线程从函数 pthread_create 返回之前就已经运行了,甚至新线程可能在当前线程从pthread_create返回之前就已经运行完毕了
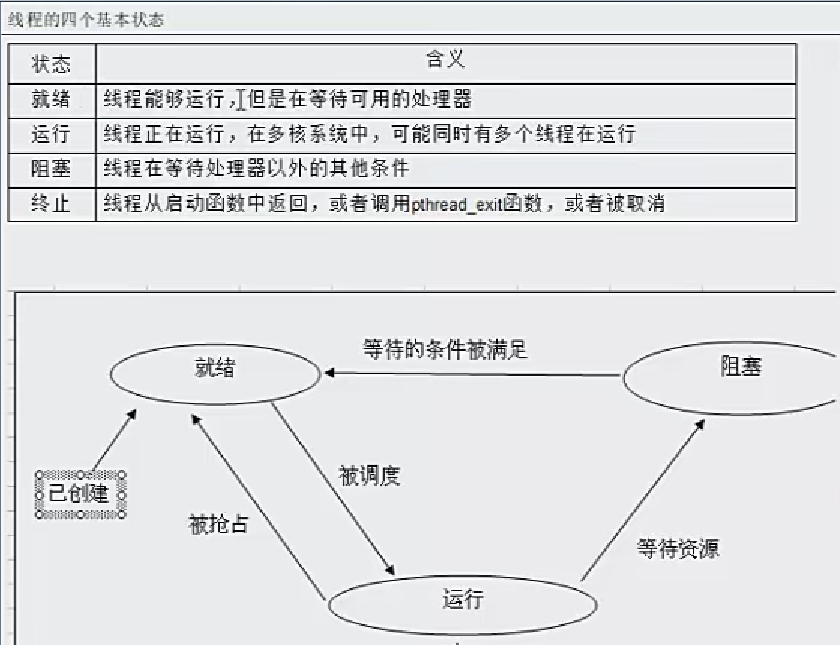
# 线程状态
就绪:等待可用的CPU资源,其他条件一切准备好。当线程被pthread_create创建时或者阻塞状态结束后就处于准备状态。
运行 :线程已经获得CPU的使用权,并且正在运行,在多核心的机器中同时存在多个线程正在运行。如果这种情况不加以控制,会造成整个程序没响应。
阻塞:指一个线程在执行过程中暂停,以等待某个条件的触发。
- 例如线程可能在处理有关I/O的任务,可能I/O设备繁忙尚未响应或没有可用的I/O缓存。
- 也可能当前线程等待一个可用的条件便来变量。
- 错误地对一个已被锁住的互斥量加锁
- 调用sigwait等待尚未发生的信号。
终止:线程已经从回调函数中返回,或者调用pthread_exit返回,或者被强制终止。
# 线程的回收
- 线程默认是 非分离的
- 具有分离性的线程,终止时会立刻被回收,回收将释放所有线程终止时来释放的系统资源
- 线程占用的程序资源,需要自己释放
- 没有被分离的线程在终止时,保留了虚拟内存及系统资源,这种线程被称为僵尸线程
# 线程的控制
线程的控制是指通过一些特定的函数对线程进行终止、连接、取消、清除等操作。
# 线程终止
exit 是危险的
- 如果进程中的任意一个线程调用了exit,_Exit, _exit,那么整个进程就会终止。
普通的单个线程有3种方式退出(不会终止进程)
从启动例程中返回,返回值是线程的退出码
线程可以被同一进程中的其它线程取消
线程调用pthread_exit(void *rval) 函数,rval是退出码
void pthread_exit(void *retval); 函数总数成功的#include "stdio.h" #include "pthread.h" #include "string.h" #include "stdlib.h" #include "unistd.h" #include "sys/types.h" void *thread_fun(void *arg) { if(strcmp("1",(char *)arg)==0) { printf("new thread return\n"); return (void *) 1; } if(strcmp("2",(char *)arg)==0) { printf("new thread pthread_exit\n"); pthread_exit((void *)2); } if(strcmp("3",(char *)arg)==0) { printf("new thread exit\n"); exit(3); } } int main(int argc,char *argv[]) { int err; pthread_t self; err = pthread_create(&self,NULL,thread_fun,(void *)argv[1]); if(err!=0) { printf("create new thread failed\n"); return -1; } sleep(2); return 0; }
# 线程链接
int pthread_join(pthread_t tid,void *rval);
pthread_t tid //指定线程的tid
void *rval //参数的rval是指定线程的返回码,如果线程被取消,那么rval是PTHREAD_CANCELED
// 返回值:成功0 失败错误码
- 使一个线程等待另一个线程结束 , 代码中如果没有pthread_join,主线程会很快结束从而使整个进程结束,从而使创建的线程没有机会开始执行就结束了。
- 加入pthread_join后,主线程会一直等待直到等待的线程结束自己才结束,使创建的线程有机会执行。
- 调用该函数会一直阻塞,直到指定的线程tid调用pthread_exit从启动例程返回或者被取消
- 调用该函数会使指定线程处于分离状态,如果指定线程已经处于分离状态,那么调用就会失败
int pthread_detach(pthread_t thread);
thread // 线程tid
- 该函数可以分离一个线程
- 成功返回0 失败返回错误码
函数test
#include "stdio.h"
#include "pthread.h"
#include "string.h"
#include "stdlib.h"
#include "unistd.h"
#include "sys/types.h"
void *thread_fun1(void *arg)
{
printf("i am thread one\n");
return(void *)1;
}
void *thread_fun2(void *arg)
{
printf("i am thread two");
pthread_detach(pthread_self());
pthread_exit((void *)2);
}
int main()
{
int err1,err2;
pthread_t self1,self2;
void *rval1, *rval2;
err1 = pthread_create(&self1,NULL,thread_fun1,NULL);
err2 = pthread_create(&self2,NULL,thread_fun2,NULL);
if(err1 || err2)
{
printf("create new thread failed\n");
return 0;
}
printf("my name is main thread successed!\n");
printf("join1 return code is %d\n ",pthread_join(self1,&rval1));
printf("join2 return code is %d\n ",pthread_join(self2,&rval2));
printf("thread1 exit code is %d\n",(int *)rval1);
printf("thread2 exit code is %d\n",(int *)rval2);
printf("my name is main thread successed!\n");
return 0;
}
结果
[root@localhost test]# gcc -lpthread -o join join.c
[root@localhost test]# ./join
my name is main thread successed!
i am thread twoi am thread one
join1 return code is 0
join2 return code is 22
thread1 exit code is 1
thread2 exit code is 0
my name is main thread successed!
# 线程取消
取消只是发送一个去请求,使得线程处于就绪状态,并不是使得线程终止。
int pthread_cancel(pthread_t tid);
// tid 待取消的指定的线程
// 成功返回0
int pthread_setcancelstate(int state,int *oldstate);
- 设置线程对cancel信号的反应
- state 有两种方式
- PTHREAD_CANCEL_ENABLE(缺省)
- PTHREAD_CANCEL DISABLE
取消线程的类型,是线程对取消信号的响应方式,立即取消或者延时取消,线程创建时默认延时取消。延时取消是到取消点再取消。
int pthread_setcanceltype(int type,int *oldtype);
关于取消点
取消一个线程,它通常需要被取消线程的配合,线程在很多时候会查看自己是否有取消请求,如果有就主动退出,这些查看是否有取消的地方称为取消点。
很多时候都有查看的动作:
- pthread_join()
- pthread_testcancel()
- pthread_cond_wait()
- pthread_timedwait()
- sem_wait()
- sigwait()
- write
- read
- 大多数的系统阻塞调用
# 信号处理
# pthread_kill
int pthread_kill(pthread_t tid,int sig);
- 不会杀掉线程,而是发送一个信号量
- tid 要发送信号的线程tid
- sig 信号 0是保留信号,作用是用来判断线程是不是还活着
- 返回值
- 成功 0
- 线程不存在 ESRCH
- 线程不合法 EINVAL
int kill_rc = pthread_kill(thread_id,0);
if(kill_rc == ESRCH)
printf("the specified thread did not exists or already quit\n");
else if(kill_rc == EINVAL)
printf("signal is invalid\n");
else
printf("the specified thread is alive\n");
# 信号处理
int sigaction(int signum,const struct sigaction *act,struct sigaction *oldact);
给信号signum设置一个处理函数,处理函数在sigction中指定
act.sa_mask 信号屏蔽字
act.sa_handler 信号集处理程序
int sigemptyset(sigset_t *set);清空信号集
int sigfillset(sigset_t *set);将所有信号加入信号集
int sigaddset(sigset_t *set,int signum);增加一个信号到信号集
int sigdelset(sigset_t *set,int signum);删除一个信号到信号集
# 线程的同步
# 互斥量
互斥量是另一种用于多线程中的同步访问方法,它允许程序锁住某个对象,使得每次只能有一个线程访问它。为了控制对关键代码的访问,必须在进入这段代码之前锁住一个互斥量,然后在完成操作之后解锁。
# 为什么要使用互斥量
使用互斥量可以确保线程同步。
寄存器处理数据+1操作一般分为三步
- 从内存读变量值到寄存器
- 寄存器的值加1
- 将寄存器的值写回内存

当多个线程共享相同的内存时,需要每一个线程看到相同的视图。当一个线程修改变量时,其它线程也可以读取或者修改这个变量,就需要对这些线程进行同步操作,确保访问的变量不会混乱无效出错。
# 互斥锁的初始化、上锁、解锁、销毁
- 互斥量是
pthread_mutex_t类型的变量。 - 互斥量有两种状态:
lock(上锁)、unlock(解锁) - 当对一个互斥量加锁后,其他任何试图访问互斥量的线程都会被堵塞,直到当前线程释放互斥锁上的锁。
- 如果释放互斥量上的锁后,有多个堵塞线程,这些线程只能按一定的顺序得到互斥量的访问权限,完成对共享资源的访问后,要对互斥量进行解锁,否则其他线程将一直处于阻塞状态。
#include <pthread.h>
//pthread_mutex_t是锁类型,用来定义互斥锁
pthread_mutex_t mutex = PTHREAD_MUTEX_INITIALIZER;
//互斥锁的初始化
//restrict,C语言中的一种类型限定符,用于告诉编译器,对象已经被指针所引用,不能通过除该指针外所有其他直接或间接的方式修改该对象的内容。 第二个参数一般为NULL
int pthread_mutex_init(pthread_mutex_t *restrict mutex, const pthread_mutexattr_t *restrict attr);
//上锁
int pthread_mutex_lock(pthread_mutex_t *mutex);
//判断是否上锁
//返回值:0表示已上锁,非0表示未上锁。
int pthread_mutex_trylock(pthread_mutex_t *mutex);
//解锁
int pthread_mutex_unlock(pthread_mutex_t *mutex);
//销毁互斥锁
int pthread_mutex_destroy(pthread_mutex_t *mutex);
函数test
#include <stdio.h>
#include <stdlib.h>
#include <windows.h>
#include <iostream>
#include <queue>
#include "include/pthread.h"
#ifndef _WIN64
#pragma comment(lib,".\\lib32\\pthreadVC2.lib")
#else
#pragma comment(lib,".\\lib64\\pthreadVC2.lib")
#endif
/*
4、 互斥量用pthread_mutex_t类型的数据表示,在使用之前需要对互斥量初始化
1)、如果是动态分配的互斥量,在申请内存(malloc)之后, 可以调用pthread_mutex_init()函数初始化
2)、如果是静态分配的互斥量,不需要调用 pthread_mutex_init() 函数。还可以把它置为常量PTHREAD_MUTEX_INITIALIZER
3)、动态分配的互斥量在释放内存之前需要调用pthread_mutex_destroy()
*/
pthread_mutex_t mutex = PTHREAD_MUTEX_INITIALIZER;
struct queue {
int len;
int write_pos;
int read_pos;
int data[50];
};
struct queue *queue_init()
{
struct queue *que;
//申请内存
que = (struct queue *)malloc(sizeof(struct queue));
if (que == NULL)
{
printf("malloc failed\n");
return NULL ;
}
//初始化
que->len = 0;
que->write_pos = 0;
que->read_pos = 0;
return que;
}
void queue_destroy(struct queue *que)
{
//销毁互斥量和que
pthread_mutex_destroy(&mutex);
free(que);
}
void *queue_add(void *arg)
{
struct queue *que = (struct queue *)arg;
int buf = 0;
while (buf < 50)
{
pthread_mutex_lock(&mutex);
que->data[que->write_pos] = buf;
que->write_pos++;
que->len++;
buf++;
printf("write data %d to queue\n", que->data[que->write_pos - 1]);
pthread_mutex_unlock(&mutex);
Sleep(1);
}
return (void*)0;
}
void *queue_del(void *arg)
{
struct queue *que = (struct queue *)arg;
int buf = 0;
while (1)
{
Sleep(2);
pthread_mutex_lock(&mutex);
buf = que->data[que->read_pos];
que->read_pos++;
if (que->len-- == 0)
{
printf("queue is empty\n");
return (void*)0;
}
buf++;
printf("read data %d from queue\n", que->data[que->read_pos - 1]);
pthread_mutex_unlock(&mutex);
}
}
int main()
{
pthread_t tid1, tid2;
int err;
struct queue *que;
//队列和锁都要初始化
que = queue_init();
//如果是静态分配的互斥量,不需要调用 pthread_mutex_init() 函数。
//还可以把它置为常量PTHREAD_MUTEX_INITIALIZER
/*err = pthread_mutex_init(&mutex, NULL);
if (err)
{
printf("mutex init failed\n");
free(que);
return 0;
}
*/
err = pthread_create(&tid1, NULL, queue_add, (void *)que);
if (err)
{
printf("create add thread failed\n");
queue_destroy(que);
return 0;
}
err = pthread_create(&tid2, NULL, queue_del, (void *)que);
if (err)
{
printf("create del thread failed\n");
queue_destroy(que);
return 0;
}
//等待增加和删除操作完成
pthread_join(tid1, NULL);
pthread_join(tid2, NULL);
//销毁
queue_destroy(que);
return 0;
}
# 死锁的情况
- 同一个线程已拥有A锁的情况下,再次请求获取A锁,导致线程阻塞 解决方法:使用完资源后立刻解锁
- 线程一拥有A锁,再次请求获取B锁,同时线程二拥有B锁,请求获取A锁,导致线程阻塞 解决方法:当拥有锁的情况下,请求获取另外一把锁失败时,释放已拥有的锁
# 读写锁
# 读写锁与互斥锁的区别
互斥量可以使得多线程并行,但是带来了新的问题, 即同一时刻只有一个线程能运行,其他竞争不到互斥量的线程会被阻塞,这就阻碍了程序的并行性。
读写锁与互斥量类似,不过读写锁有更高的并行性。对于一个变量的读操作,完全可以让多个线程同时进行操作,多个读操作同时进行不会改变数据。
# 读写锁的状态
读写锁非常适合对数据结构读次数大于写次敌的程序,当它以读模式锁住时,是以共享的方式锁住的;当它以写模式谈住时,是以独占的模式谈住的。
- 读模式下加锁
- 多个线程可以同时占有读模式的读写锁
- 所有试图以读模式对其加锁的线程都会获得访问权,但是如果线程希望以写模式对其加锁,它必须阻塞直到所有的线程释放锁
- 写模式下加锁
- 一次只有一个线程可以占有写模式下的读写锁
- 读写锁在写加锁状态时,在它被解锁之前,所有试图对这个锁加锁的线程都会阻塞
- 线程试图以写模式对其加锁,那么读写锁会阻塞随后的读模式锁请求
- 不加锁
# 读写锁的初始化和销毁
读写锁在使用之前必须初始化
int pthread_rwlock_init(pthread_rwlock_t *restrict rwlock, const pthread_rwlockattr_t *restrict attz);
成功返回0﹐共败返回错误码
使用完需要销毁
int pthread_rwlock_destroy(pthread_rwlock_t *rwlock);
成功返回0﹐共败返回错误码
# 读模式加锁
NAME
pthread_rwlock_rdlock, pthread_rwlock_tryrdlock — lock a read-write lock object for reading
SYNOPSIS
#include <pthread.h>
int pthread_rwlock_rdlock(pthread_rwlock_t *rwlock);
int pthread_rwlock_tryrdlock(pthread_rwlock_t *rwlock);
# 写模式加锁
NAME
pthread_rwlock_trywrlock, pthread_rwlock_wrlock — lock a read-write lock object for writing
SYNOPSIS
#include <pthread.h>
int pthread_rwlock_trywrlock(pthread_rwlock_t *rwlock);
int pthread_rwlock_wrlock(pthread_rwlock_t *rwlock);
# 读写锁的解锁
NAME
pthread_rwlock_unlock — unlock a read-write lock object
SYNOPSIS
#include <pthread.h>
int pthread_rwlock_unlock(pthread_rwlock_t *rwlock);
# 函数实例
#include <iostream>
#include <pthread.h>
#include <unistd.h>
using namespace std;
pthread_rwlock_t rwlock;
int shared_num = 100;
void* thread_fun1(void *arg)
{
pthread_rwlock_wrlock(&rwlock);
cout << "thread 1: " << shared_num << endl;
sleep(2);
pthread_rwlock_unlock(&rwlock);
return (void*)1;
}
void* thread_fun2(void *arg)
{
pthread_rwlock_rdlock(&rwlock);
cout << "thread 2: " << shared_num << endl;
sleep(2);
pthread_rwlock_unlock(&rwlock);
return (void*)1;
}
int main()
{
pthread_t tid1, tid2;
pthread_rwlock_init(&rwlock, NULL);
pthread_create(&tid1, NULL, thread_fun1, NULL);
pthread_create(&tid2, NULL, thread_fun2, NULL);
pthread_join(tid1, NULL);
pthread_join(tid2, NULL);
pthread_rwlock_destroy(&rwlock);
return 0;
}
# 条件变量
# 为什么需要条件变量
有一个IO请求队列,入队线程不断的往队列里面push_back请求,出队线程不断的从队列里面pop_front请求。
入队线程在push_back的时候要独占队列,出队线程在pop_front的时候也要独占队列。
如果在某一时刻,入队线程抢到了互斥量,但是发现队列是满的,自己不断的轮询查询队列是否非满状态这样很消耗CPU资源,也导致无意义的占用锁资源。
出队线程由于拿不到互斥量,一直阻塞。这样会导致程序僵死或者时间消耗变大。
换句话说就是当线程拿到锁之后,如果发现不满足自己的执行条件就应该立即释放锁,并阻塞在当前位置,等待满足自己的执行条件时,通过某种途径来唤醒它继续运行。
如,入队线程查询到队列是满的时候,就应该释放锁,出队线程开始工作消耗队列。
这时我们引入条件变量来解决这种场景。
# 条件队列的初始化、销毁
条件变量的申明:pthread_cond_t cond;
NAME
pthread_cond_init — initialize condition variables
SYNOPSIS
#include <pthread.h>
int pthread_cond_init(pthread_cond_t *restrict cond,
const pthread_condattr_t *restrict attr);
第一个参数是创建的条件变量,第二个参数是属性,默认为NULL
NAME
pthread_cond_destroy — destroy condition variables
SYNOPSIS
#include <pthread.h>
int pthread_cond_destroy(pthread_cond_t *cond);
# 条件队列的使用
NAME
pthread_cond_wait — wait on a condition
SYNOPSIS
#include <pthread.h>
int pthread_cond_wait(pthread_cond_t *restrict cond,
pthread_mutex_t *restrict mutex);
需要等待条件为真,即等待传入的第一个参数cond,执行pthread_cond_wait函数的线程会阻塞,直到cond条件为真,线程恢复运行。
第二个参数互斥量mutex,就是线程在还没发现是否满足自己条件时加的锁,在pthread_cond_wait函数里面进行释放。当条件满足时,继续对互斥量加锁,线程就可以在满足自己条件的情况下继续往下执行。
这一系列动作都由pthread_cond_wait在完成。
NAME
pthread_cond_timedwait — wait on a condition
SYNOPSIS
#include <pthread.h>
int pthread_cond_timedwait(pthread_cond_t *restrict cond,
pthread_mutex_t *restrict mutex,
const struct timespec *restrict abstime);
- 在等待条件变量cond为真的过程中增加等待时间,超过等待时间就不等了,直接返回。
当条件满足时,需要唤醒等待条件变量的线程:
NAME
pthread_cond_broadcast, pthread_cond_signal — broadcast or signal a condition
SYNOPSIS
#include <pthread.h>
int pthread_cond_broadcast(pthread_cond_t *cond);
int pthread_cond_signal(pthread_cond_t *cond);
唤醒等待条件变量的线程有两个函数:
- pthread_cond_broadcast唤醒等待条件变量的所有线程。
- pthread_cond_signal至少唤醒等待条件变量的某一个线程,至于唤醒哪一个线程由系统的调度机制决定
# 函数实例
#include <iostream>
#include <pthread.h>
#include <unistd.h>
#include <list>
using namespace std;
pthread_mutex_t lock; //入队,出队之前要加独占锁
pthread_cond_t cond; //条件变量
list<int> _queue; //请求队列
#define queue_max_size 5 //队列最大存放请求个数
void _enqueue(int op)
{
pthread_mutex_lock(&lock);
if(_queue.size() >= 5){
cout << "current queue is full, please wait" << endl;
pthread_cond_wait(&cond, &lock); //队列满了就阻塞这里,并释放互斥量,等待条件变量唤醒
}
_queue.push_back(op);
pthread_mutex_unlock(&lock);
}
int _dequeue()
{
int op;
pthread_mutex_lock(&lock);
if(_queue.empty()){
cout << "current queue is empty" << endl;
}else {
op = _queue.front();
_queue.pop_front();
pthread_cond_signal(&cond); //通知条件变量满足条件了,唤醒因为这个条件变量阻塞的线程
}
pthread_mutex_unlock(&lock);
return op;
}
//入队线程工作函数
void* enqueue_op(void* arg)
{
int n = 1;//每次入队的内容是一个整数
while(true){
sleep(1); //控制每秒入队一个请求
_enqueue(n);
cout << "op enqueue success: " << n << endl;
n++;
}
return NULL;
}
//出队线程工作函数
void* dequeue_op(void* arg)
{
int op; //每次出队的请求
while(true){
sleep(2); //控制每秒出队一个请求
op = _dequeue();
cout << "op dequeue success " << op << endl;
}
return NULL;
}
int main(int args, const char **argv)
{
// 初始化互斥量和条件变量
pthread_mutex_init(&lock, NULL);
pthread_cond_init(&cond, NULL);
// 定义两个线程变量
pthread_t th_enqueue, th_dequeue;
//入队线程
pthread_create(&th_enqueue, NULL, enqueue_op, NULL);
// 出队线程
pthread_create(&th_dequeue, NULL, dequeue_op, NULL);
//等待子线程值执行完成
pthread_join(th_enqueue, NULL);
pthread_join(th_dequeue, NULL);
//销毁资源
pthread_mutex_destroy(&lock);
pthread_cond_destroy(&cond);
return 0;
}